COMSOL has the best multiphysical simulation capabilities in my experience. Technical support from Elisa at TECHNIC as well as the engineers at COMSOL has been great.
COMSOL is an important part of our research in plasma physics. We use it in the design of plasma systems and it helps us to obtain a greater understanding of the underlying physics. We have always valued the quick support from TECHNIC and COMSOL and it has been a pleasure to work with them.
Comsol has become a valuable part of our design and decision making process. The exceptional flexibility and access to the physics and solvers in Comsol has allowed us to have deeper understanding on thermomechanical solutions. Technic and Comsol have always been quick and helpful to resolve any issues and provide helpful advice on their products.
At Scion we use COMSOL Multiphysics to understand energy processes, such as the interplay of non-linear solid mechanics and heat & mass transfer during biomass compaction, to design new or more efficient processes.
We use COMSOL Multiphysics to design the customised muffler. With it, we can simulate the insertion loss at different spectrum with different muffler designs.
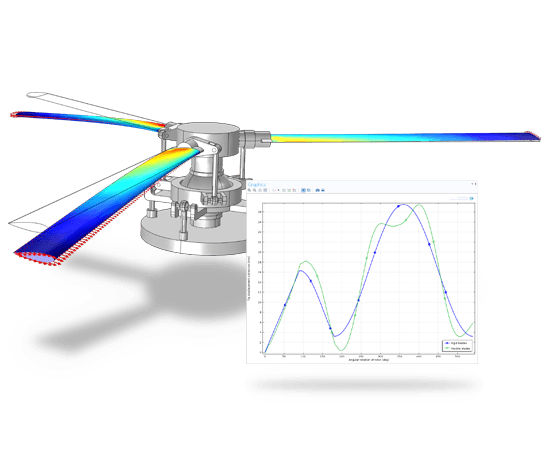
The Multibody Dynamics Module is an add-on to the COMSOL Multiphysics software that provides an advanced set of tools for designing and optimising multibody structural mechanics systems using finite element analysis (FEA). The module enables you to simulate mixed systems of flexible and rigid bodies, where each body may be subjected to large rotational or translational displacements. Such analyses help identify critical points in your multibody systems, thus enabling you to perform more detailed component-level structural analyses. The Multibody Dynamics Module also gives you the freedom to analyse forces experienced by segments of the structure, and stresses generated in flexible components that may lead to failure due to large deformation or fatigue.
A library of predefined joints is included in the module so that you can easily and robustly specify the relationships between different components of a multibody system, where the components are interconnected such that only a certain type of motion is allowed between them. Joints connect two components through attachments, where one component moves independently in space while the other is constrained to follow a particular motion, depending on the joint type. The joint types in the Multibody Dynamics Module are generic to the extent that they can model any type of connection. Researchers and engineers can thereby design accurate multibody structural mechanics models, using the following joint types:
Components of a system that undergo deformations can be modelled as flexible, while other components, or even parts of these components, can be specified as rigid. You can also provide your multibody dynamics design and analyses with nonlinear material properties by combining models in the Multibody Dynamics Module with either the Nonlinear Structural Materials Module or the Geomechanics Module. At the same time, the rest of the physics that you can model with COMSOL Multiphysics and the suite of application-specific modules, can be coupled to the physics described by the Multibody Dynamics Module, such as the effects of heat transfer or electrical phenomena.
Transient, frequency-domain, eigenfrequency, and stationary multibody dynamics analyses can be performed. Joints can be assigned linear/torsional springs with damping properties, applied forces and moments, and prescribed motion as a function of time. Analysis and postprocessing capabilities include:
Often, motion between two components is restricted due to the presence or functions of other physical objects. Limiting and conditionally locking the relative motion can be specified for the joints in order to fully define and model these complex systems. In robotics, for example, the relative motion between two arms can be defined as a pre-defined function of time. Joints can also be spring-loaded and appropriate damping factors can be included in the Multibody Dynamics Module.
In order to fully evaluate whether or not the COMSOL Multiphysics® software will meet your requirements, you need to contact us. By talking to one of our sales representatives, you will get personalised recommendations and fully documented examples to help you get the most out of your evaluation and guide you to choose the best license option to suit your needs.
Fill in your contact details and any specific comments or questions, and submit. You will receive a response from a sales representative within one business day.
 Tel: +61 (03) 6224 8690Email: info@technic.com.auConnect on LinkedInGet Your Free Trial
Tel: +61 (03) 6224 8690Email: info@technic.com.auConnect on LinkedInGet Your Free TrialCopyright © 2021 Technic Pty Ltd. All Rights Reserved. See our Privacy Policy. Site protected by reCAPTCHA - Privacy | Terms. Website by Gloo.
